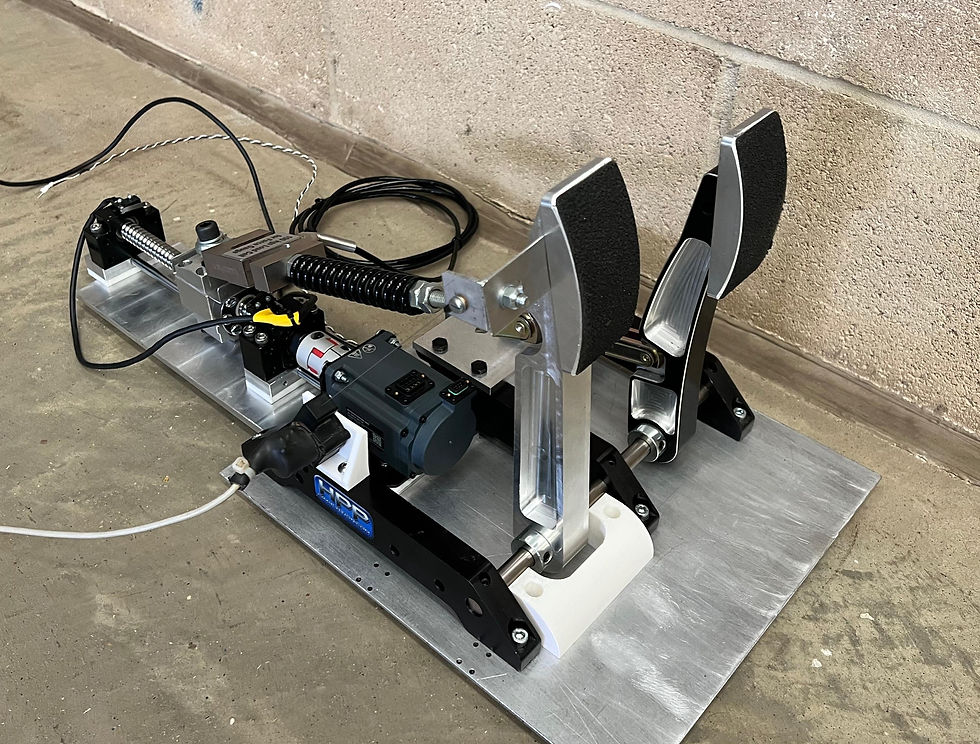
Active DIL Brake Pedal
12/09/25
This project covers the analysis, design and testing of an electromechanical actively adjustable
brake pedal to replicate the feel of a real-life race car. This project aims to produce
a viable brake pedal design, capable of replicating the kinematics of different vehicle
brake pedals.
Analytical analysis was conducted first to build a MATLAB model capable of incorporating
various parameter changes. Two areas of adjustment were investigated: Pedal Ratio
and Pedal Base length. Pedal Base length adjustment was deemed less complicated than
Pedal Ratio adjustment and easier to implement.
A mechanical design was created based off an existing HPP Simulation PRX Pedal box,
whilst reusing as many components as possible.
A design for an electrical system was created in order to actuate a Ball screw and effectively
adjust the Pedal Base length. A simplistic control system was created to replicate
the desired pedal kinematics.
This project concludes with a short test and validation of the performance of the combined
mechanical and electrical system.
The system provided promising results and serves as a functional simulator brake pedal,
that is able to replicate the kinematics of a desired brake pedal.
Project Gallery



